Pick & Place
Perspectiva general
Pick & Place y Bin Picking con Motoman Robots
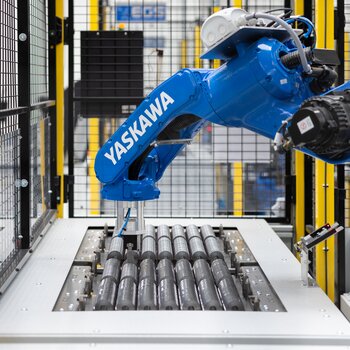
Un robot de recogida y colocación se utiliza para automatizar el proceso de recoger objetos y colocarlos en una superficie en una posición y orientación determinadas. Esta acción se utiliza con frecuencia para clasificar o colocar productos en una disposición específica para un proceso posterior, como bandejas o cajas, donde la maquinaria fija u otro robot puede manipular adecuadamente los productos. Los trabajos típicos de pick & place se utilizan para la preparación de pedidos a alta velocidad, el cotejo, la transferencia de piezas, la singularización, la clasificación y la inspección. En muchos casos, las piezas vienen a lo largo de una cinta transportadora, y el movimiento pick & place ayuda a clasificar o disponer las piezas en un orden determinado en la ubicación.
Pick and Pack es una variación de Pick & Place, utilizada en el embalaje, donde el movimiento de colocación es más complejo para llenar contenedores, cajas o cajones. Algunos dicen PPP - Pick, Place and Pack. La terminología no está estandarizada en este campo.
"Bin Picking" es una tecnología emergente de picking robótico de piezas con visión 3D.
Velocidad y rendimiento
Todas las aplicaciones de picking y colocación tienen el mismo objetivo en su libro de especificaciones: alto rendimiento y bajos tiempos de ciclo. El picking y la colocación es un trabajo exigente para los robots. No es un espacio para manipuladores de juguete poco fiables. Los robots Motoman son lo suficientemente rígidos y estables como para realizar el trabajo las 24 horas del día, sin que se recalienten los accionamientos, se frenen las cajas de cambios o salgan volando los pernos y los brazos después de algunas semanas....
Robots y productos Motoman para el picking y la colocación
Para el picking de alta velocidad, el cotejo, la transferencia de piezas, la singularización, la clasificación y la inspección, los robots van desde los 2 kg de capacidad de carga hasta los 10 kg, con tiempos de ciclo de hasta 150 ciclos de picking por minuto. Nuestras familias de modelos de robots de recogida y colocación incluyen brazos articulados enlazados en serie con 5 ó 6 grados de libertad, brazos paralelos de estilo delta con 4 grados de libertad y brazo de estilo SCARA con 4 grados de libertad.
Pick&Place con robots Delta (serie MPP3)
En términos de velocidad, nada puede superar a nuestros Robots Delta (MPP3H, MPP3s), ¡acelerando hasta 4 ciclos de recogida por segundo! Si coloca cuatro de ellos en una fila sobre una cinta transportadora, equipados con la cámara MotoSight 2D y el software MotoPick, puede alcanzar velocidades de recogida del orden de 600 a 800 piezas/minuto por línea de picking.
Pick & Place con robots SCARA (Serie SG)
Los robots SCARA (robots articulados horizontalmente) son una buena opción para los trabajos de recogida y colocación hacia arriba y hacia abajo en una mesa plana. Nuestros nuevos modelos de robots de la serie SG (SG450, SG650) ofrecen unas velocidades de eje increíbles (eje R 3000 grados/seg.), capaces de realizar unas tasas de recogida extraordinariamente altas con un precio atractivo.
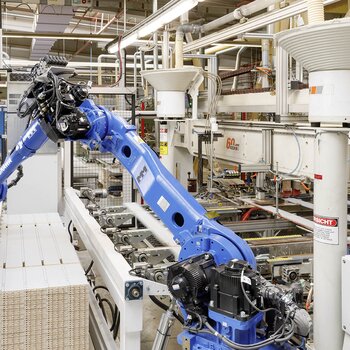
Robots Pick & Place de 5 ejes (Serie MPK)
Estos robots articulados suelen estar montados en el techo sobre una cinta, de forma similar a los robots Delta, pero con una capacidad de movimiento más versátil. Pueden recoger y girar una pieza hasta el lugar de colocación deseado.
Pick & Place con robots de 6 ejes (MotoMini, Serie GP)
Nuestros pequeños robots de 6 ejes (MotoMini, GP7/GP8) son la elección cuando se necesita girar/inclinar la pieza durante el movimiento de recogida, o cuando la dirección de recogida es diferente a la de colocación.
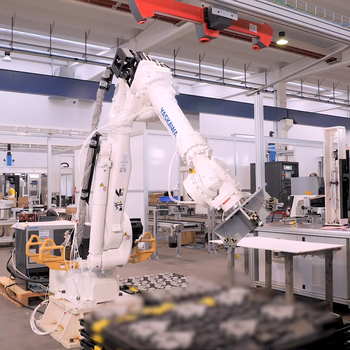
Los robots de 6 ejes más grandes se utilizan para aplicaciones Pick&Place más complejas, en las que realmente se requiere la libertad de movimiento de 6 grados. La mayor velocidad no es un problema en este caso. Por ejemplo, en aplicaciones de picking de contenedores, en las que un software de visión artificial determina la posición individual del objetivo y la trayectoria de aproximación para cada pieza, y en las que se requieren maniobras de movimiento de vez en cuando para hacer frente a las paredes del contenedor y a las piezas vecinas en el mismo.
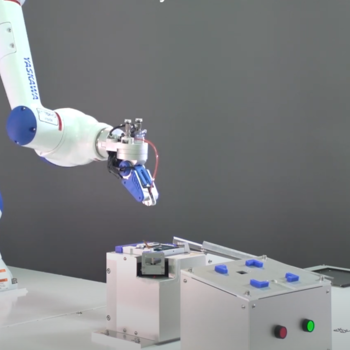
Pick & Place con robots colaborativos (serie HC)
Los cobots como el HC10 no pueden competir con esos robots industriales en términos de velocidad, pero pueden tener otras ventajas a tener en cuenta para las aplicaciones de Pick and Place: facilidad de uso, instalación sin barreras o simplemente asistencia a un humano durante su trabajo. Nuestros cobots HC10 son híbridos, ya que son capaces de pasar del modo de interacción humana segura a velocidades más rápidas en las fases en las que el operario está ausente. Los robots colaborativos (HC10) podrían ser la elección en entornos de terrenos baldíos, ahorrando espacio de instalación al evitar las vallas. Son muy flexibles en términos de recodificación y flexibilidad de ubicación. Con los Cobots se pueden realizar estaciones de picking muy atractivas, inteligentes y esbeltas.
Seguimiento de cintas transportadoras y seguimiento de líneas
Una funcionalidad básica del controlador del robot para aplicaciones Pick & Place es el seguimiento de la cinta transportadora, que permite la sincronización de la trayectoria del robot con un movimiento externo capturado por un codificador, como una cinta transportadora. La función de seguimiento de la cinta transportadora de YASKAWA soporta tanto el seguimiento de líneas (siguiendo un movimiento lineal) como el seguimiento circular (siguiendo un movimiento circular). Gracias a un ciclo de interpolación muy rápido y al diseño de nuestra placa de sensores de la cinta transportadora, la sincronización de la cinta es muy sensible y reacciona perfectamente incluso a pequeños cambios de velocidad de la cinta transportadora.
Software MotoPick
El software MotoPick hace que la instalación y la programación de esas líneas de picking sean absolutamente fáciles, hace todos los cálculos por usted y decide automáticamente qué robot es el siguiente en recoger una pieza. Todos los robots Motoman pueden combinarse con cintas transportadoras sincronizadas para realizar operaciones de picking de alta velocidad. Múltiples robots, sistemas de visión y cintas transportadoras de varias piezas se coordinan mediante una solución de software común para la clasificación precisa de productos y la inserción de paquetes. Con nuestro software MotoPick de fácil configuración, puede organizar hasta 4 robots Pick&Place en una línea detrás de una cámara de visión 2D que identifique las piezas entrantes en la cinta y distribuya el trabajo de picking a los robots que comparten la cinta. Estas líneas de picking pueden alcanzar unos índices de recogida realmente enormes.
Programación de robots con bloques de función PLC/IEC 61131 (MotoLogix)
Los Robots Pick&Place suelen estar embebidos o integrados en un entorno de maquinaria controlada por PLC/Lógica o Movimiento. Si usted es un OEM para Líneas de Embalaje de Alta Velocidad, con mucho movimiento en su línea de producción y sólo unos pocos robots de Pick/Place/Paletizado aquí y allá, a sus programadores de PLC les gustará nuestra herramienta de programación basada en PLC Motologix. Los trabajos de movimiento del robot son programados completamente por el programador del PLC en su entorno de desarrollo de programas basado en IEC. Motologix proporciona todos los bloques de función del PLC necesarios para controlar el movimiento de recogida y colocación del robot, incluido el soporte de la cinta transportadora. No es necesario desenterrar un teach pendant robótico ni aprender un lenguaje de programación de robots.
Pinzas robóticas
Un factor crucial para el éxito de una instalación robótica de pick&place es la pinza. La inercia extrema de un ciclo robótico rápido puede hacer que una pieza salga volando de la pinza si no se fija correctamente. A menudo se utilizan pinzas de succión, a veces apoyadas por características mecánicas inteligentes para evitar que la pieza salga volando debido a las aceleraciones extremas. Yaskawa puede ayudarle con una excelente red y experiencia con proveedores de todo tipo de productos de pinzas neumáticas, eléctricas paso a paso/servo o exóticas. La tecnología de impresión en 3D se utiliza a menudo para el diseño de los dedos o la carcasa de las pinzas, con el fin de reducir el peso, el tiempo de inactividad y el tiempo de sustitución de las piezas de recambio.
Algunas pinzas colaborativas han sido diseñadas explícitamente para una colaboración segura entre humanos y robots.
Todas las instalaciones de robots-pinzas de MOTOMAN son fáciles de implementar, tanto si se benefician de nuestro rico conocimiento en materia de interconexión, como de nuestra serie inteligente de pinzas, que es una iniciativa inteligente de Yaskawa para las pinzas Plug&Play. La mayoría de los robots Motoman de 5/6 ejes tienen un cableado interno estándar dentro del brazo, lo que le ayuda a evitar los paquetes de cables externos. Los controladores de Yaskawa soportan todo tipo de comunicación de E/S, bus de campo o Wi-Fi con las pinzas, incluyendo Ethernet, Profinet, Profibus, Devicenet, Ethercat, IOLink. Todos los métodos de enseñanza (Teach Pendant estándar, Smart Pendant y Hand Guiding) ofrecen métodos sencillos y rápidos para controlar las pinzas. Algunas pinzas controladas por fuerza/posición requieren la configuración de parámetros, algunas soluciones están integradas en la HMI del robot para mayor comodidad.
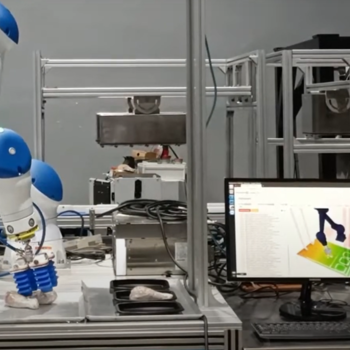
Sistemas de visión artificial (2D, 2.5D, 3D)
En muchas operaciones de Pick & Place intervienen sistemas de visión artificial. La tecnología de visión artificial ha experimentado un gran avance en los últimos 5 años, en términos de miniaturización, simplicidad y capacidad. Permiten a los robots identificar y localizar las piezas no clasificadas situadas en una mesa, una bandeja o una cinta transportadora. Con un cierto procesamiento de software, indican al robot dónde recoger las piezas y cómo acercarse a ellas. Además, permiten inspeccionar las características de las piezas y los resultados del montaje.
El Pick & Place basado en la visión artificial es un equilibrio entre velocidad y flexibilidad.
Los robots Motoman pueden integrarse perfectamente con sistemas de visión de todo tipo. O pregúntenos por nuestras interfaces genéricas o individuales con cientos de soluciones de cámaras y software diferentes que hemos llevado con éxito a aplicaciones de trabajo a lo largo de los años.
Visión 2D MotoSight
Para las aplicaciones Pick and Place, la simple visión artificial 2D es suficiente para localizar las posiciones de recogida en una mesa o una cinta transportadora. Las piezas deben ser más bien planas y no superponerse, y los sistemas de visión 2D requieren una buena iluminación constante y un alto contraste entre la pieza y el fondo.
MotoSight2D es un producto de cámara inteligente totalmente integrado que recomendamos, aunque admitimos todo tipo de sistemas de cámara de visión de terceros.
Bin Picking 3D, Picking Inteligente, Deep Learning
El Robotic Bin Bicking es una tecnología capaz de recoger piezas de un contenedor que han sido vertidas aleatoriamente con anterioridad, y que ahora vienen en un orden caótico. Para hacer frente a este reto, el Robotic Bin Picking combina una avanzada tecnología de visión artificial 3D, un complejo software de planificación de trayectorias y una inteligente tecnología de agarre de piezas.
La tecnología de recogida de contenedores es muy flexible y ha evolucionado mucho en los últimos años en cuanto a velocidad, inteligencia de detección y facilidad de instalación.
Desde el punto de vista de la visión artificial, las aplicaciones de Bin Picking tienen varios niveles de desafío:
- todas las piezas del contenedor son idénticas, la geometría de la pieza se conoce de antemano - las piezas de muestra se pueden entrenar por adelantado.
- diferentes variantes de piezas en el contenedor, la geometría de la pieza se conoce de antemano - las piezas de muestra se pueden entrenar por adelantado
- diferentes variantes de piezas en el contenedor, la geometría de la pieza no se conoce exactamente antes - las piezas de muestra no pueden entrenarse por adelantado.
Mientras que 1. y 2. pueden abordarse con el software clásico de reconocimiento de piezas en 3D, 3. puede ser un caso para la inteligencia artificial y las redes neuronales.
Automatizar la distribución de una amplia y variada mezcla de piezas o SKU ya no es un reto. Los avances en la robótica de visión 3D están mejorando tanto la velocidad como la precisión en la identificación y clasificación de casi cualquier mezcla de piezas presentadas en contenedores, cajas o cartones. Los sistemas de visión convencionales requieren piezas de muestra para entrenar cada variante de pieza y situación de picking, mientras que las últimas tecnologías de software de aprendizaje profundo permiten el picking aleatorio de piezas que son entrenadas automáticamente por una red neuronal. El picking de contenedores es una aplicación desafiante: podemos ayudarle con nuestra experiencia a superar los obstáculos típicos.
El uso de alta tecnología, como el bin picking, está bien, pero no es un "must have" cuando una solución más pragmática haría el mismo trabajo. Nuestros ingenieros le ayudarán a encontrar la solución de picking mejor y más fiable para su caso de uso. A veces es posible cambiar la presentación de las piezas en sentido ascendente, lo que le permite instalar una solución técnica más sencilla, por ejemplo, almacenando las piezas en capas.
Alimentación de piezas Pick & Place con robots Motoman
Los alimentadores de piezas por vibración son una forma innovadora de presentar piezas o elementos de fijación a un robot. En combinación con alimentadores inteligentes, los pequeños robots como el MotoMini, el SG400 o el GP8 son una alternativa a los clásicos alimentadores de cubeta vibratoria. Este método de alimentación por tornillo no es más barato ni más rápido que la alimentación por tornillo clásica, pero es mucho más flexible y estable: menos requisitos de tolerancia para los tornillos, configuración más rápida sin necesidad de lotes de muestras de tornillos y fácil de adoptar a la geometría de los tornillos o a los cambios de tolerancia.