Montaje
Perspectiva general
Montaje y desmontaje con robots Motoman
Los robots industriales pueden utilizarse para automatizar las tareas de montaje o desmontaje de un producto, como componentes industriales o de automoción y maquinaria, muebles o componentes electrónicos. Los robots pueden manipular una herramienta de ensamblaje (por ejemplo, un atornillador), o mover la pieza de trabajo hacia/desde una estación de ensamblaje estacionaria. En este caso, las pinzas herramientas especializadas están unidas al extremo del brazo, para manipular piezas y conjuntos en varias etapas.
¿Qué es el montaje robotizado?
El ensamblaje (y el desmontaje) es una secuencia coordinada y una combinación de muchas operaciones individuales, como la identificación de las piezas, la clasificación de las piezas, la separación de las piezas, la alimentación de las piezas, la manipulación de las piezas, el posicionamiento de las piezas, el agarre, la inserción, la fijación/unión, la inspección de calidad y las operaciones auxiliares previas y posteriores, como la limpieza, el desbarbado, el desembalaje, el sellado, el grabado, el etiquetado .... ¡y cientos más! El controlador del robot está en medio de un flujo de comunicación, recibiendo datos (ID de la pieza, ID del trabajo) o enviando datos a las herramientas de control, enviando datos de estado a los PLC de la línea, a los sistemas MES o a la nube. Esto hace que los trabajos de ensamblaje robótico sean un reto, ¡y realmente interesantes!
Diseño para el montaje
Debido a la filosofía clásica de la automatización, siempre es deseable presentar las piezas ordenadas y posicionadas lo mejor posible al robot, en un portapiezas, en una rejilla, estantería, en una bandeja o en una capa geométrica. Las fijaciones se utilizan tanto para presentar las piezas a ensamblar como para mantener/fijar/apretar las piezas en su posición durante el proceso de ensamblaje de varios pasos.
Montaje robótico flexible
Pero los tiempos han cambiado, y la flexibilidad es uno de los genes de la robótica, beneficiosa para las crecientes exigencias de la automatización flexible actual. Hoy en día, los robots son capaces de "ver" y "sentir", y de procesar una lógica avanzada y comunicarse. Las tecnologías avanzadas, como la visión artificial, la detección de fuerza/par y las opciones de comunicación a nivel de dispositivo/célula/línea/planta y nube, hacen que el ensamblaje robótico sea mucho más flexible y versátil en términos de variaciones de piezas/trabajos/flujos de trabajo, en comparación con las máquinas de producción interconectadas y concatenadas.
Modelos de robots Motoman adecuados para el montaje/desmontaje
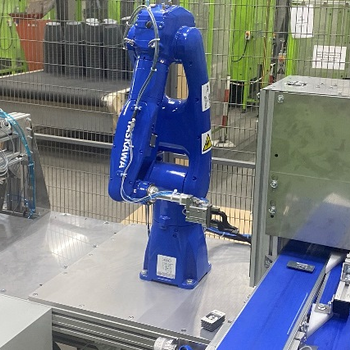
Robots de manipulación Motoman de 6/7 ejes
Normalmente recomendamos la gama más pequeña de nuestros robots de manipulación, concretamente nuestra serie GP de 6 ejes para trabajos de montaje, junto con nuestros controladores YRC1000 o YRC1000micro. Son versátiles, proporcionan alta velocidad, gran precisión de posicionamiento y todas las opciones de suministro de medios y conectividad que pueda necesitar.
La capacidad de movimiento de nuestros robots de 7 ejes de la serie SIA es aún más avanzada para espacios estrechos.
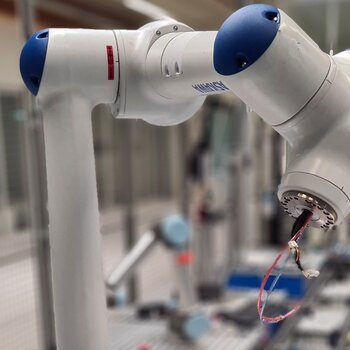
Montaje con robots colaborativos Motoman (serie HC)
Nuestros cobots HC10/HC20 son una opción atractiva cuando el proceso de montaje se comparte entre un trabajador humano y el robot, sin necesidad de cercar al robot por motivos de seguridad.
Un trabajador puede precargar todas las piezas y fijaciones en un dispositivo, el cobot sigue y fija las piezas, asegurándose de que no faltan tornillos o pernos y de que se fijan con los parámetros correctos y en la secuencia adecuada. Una función de guía del trabajador (pantallas, guía por luz, realidad aumentada) puede garantizar la secuencia correcta y la calidad del resultado del montaje de la junta. Los cobots son una opción atractiva para automatizar las operaciones de ensamblaje manual en esos días - COVID-19 nos obligará a disolver las líneas de ensamblaje manual con los trabajadores de pie uno por uno en una línea, o traer de vuelta la capacidad de trabajo a Europa.
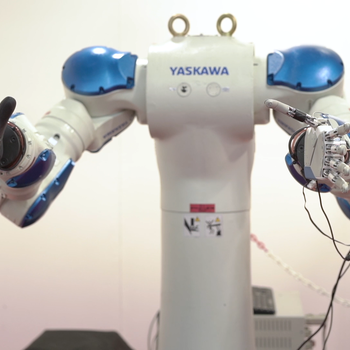
Robots Motoman de doble brazo para montaje/desmontaje (Serie SDA)
Nuestros modelos de Robots de doble brazo de 15 ejes de la Serie SDA son los "Reyes del ensamblaje": tienen una estructura cinemática mejor que la de los seres humanos con las dos manos totalmente coordinadas, y pueden realizar complejas tareas de ensamblaje con una reducción radical de los esfuerzos necesarios en el diseño de herramientas, pinzas o dispositivos. Son perfectos para trabajos en los que se requiere una destreza y un movimiento coordinado entre las dos manos (por ejemplo, piezas plegables como los cables).
Utilizar un robot de doble brazo para automatizar tareas de montaje es bastante sencillo: dejar que el robot copie el ámbito de un trabajador manual. Sin embargo, el éxito de la instalación de un robot de doble brazo SDA suele comenzar con una idea de aplicación inspirada, que haga las cosas de forma diferente, que sea innovadora, radical o disruptiva: ¿cuál es su idea?
Utilizar un robot de doble brazo para automatizar tareas de montaje es bastante sencillo: dejar que el robot copie el ámbito de un trabajador manual. Sin embargo, el éxito de la instalación de un robot de doble brazo SDA suele comenzar con una idea de aplicación inspirada, que haga las cosas de forma diferente, que sea innovadora, radical o disruptiva: ¿cuál es su idea?
Visión artificial 2D/3D en el montaje/desmontaje robótico
En el ensamblaje, la visión artificial asume muchas funciones; algunos ejemplos son
detectar la presencia de una pieza
detectar el estado de un dispositivo (vacío, pieza sujeta)
detectar la ubicación de las piezas en una mesa, una bandeja o una cinta transportadora, incluso cuando no están bien alineadas
inspección de las características de la pieza para identificar variantes
inspección de todo tipo de resultados de montaje (integridad, nivel de llenado)
Las cámaras de visión artificial pueden montarse de forma estática (en una horca sobre el objeto) o en el propio brazo del robot; en ambos casos, el robot controla el sistema de visión artificial.
En los últimos años, la visión artificial se ha convertido en algo muy rápido, fiable, fácil de usar y atractivo en términos de coste, formación y esfuerzos de integración que ya no son un obstáculo. Podrían ser una alternativa más flexible y eficiente a una población de instalaciones clásicas de sensores de proximidad.
YASKAWA Motoman ofrece su propio sistema de cámara inteligente MotoSight2D, totalmente integrado, que es absolutamente fácil de usar y perfecto para indicar al robot dónde debe recoger una pieza. Algunos proveedores de visión Plug&Play de terceros, registrados en nuestro programa Smart Series, ofrecen una solución Plug-and-play en combinación con nuestros robots.
Pero cuando se trata de aplicaciones de visión más avanzadas o sofisticadas, confiamos en nuestra red de expertos profesionales en visión artificial. Como proveedor de robots, nos aseguramos de que esos sistemas de visión puedan integrarse perfectamente con nuestros sistemas de robots, proporcionando interfaces de fácil integración como VSTART. Nuestro kit de desarrollo de software Motoplus C++ SDK proporciona cómodas API para un desarrollo de controladores de software eficaz y rápido. Pero en muchos casos no es necesario empezar desde cero. Muchos integradores de sistemas y proveedores de visión artificial de nuestra red mundial de socios tienen una excelente experiencia de integración con los robots Motoman, y nosotros mismos podemos recurrir a nuestro rico repositorio de soluciones de interfaz y controladores de software para garantizar su funcionamiento.
Pero cuando se trata de aplicaciones de visión más avanzadas o sofisticadas, confiamos en nuestra red de expertos profesionales en visión artificial. Como proveedor de robots, nos aseguramos de que esos sistemas de visión puedan integrarse perfectamente con nuestros sistemas de robots, proporcionando interfaces de fácil integración como VSTART.
Nuestro kit de desarrollo de software Motoplus C++ SDK proporciona cómodas API para el desarrollo eficaz y rápido de controladores de software, incluida la amplia comunidad ROS. Pero en muchos casos no es necesario empezar desde cero. Muchos integradores de sistemas y proveedores de visión artificial de nuestra red mundial de socios tienen una excelente experiencia de integración con los robots Motoman, y nosotros mismos podemos recurrir a nuestro rico repositorio de soluciones de interfaz y controladores de software para garantizar su funcionamiento.
Ensamblaje sensible utilizando la opción Servofloat
Yaskawa Servofloat es una gran opción para cambiar los ejes de movimiento del robot al modo suave para soportar movimientos de unión con tolerancias ajustadas. Esto permite realizar movimientos de ensamblaje sensibles en los que las tolerancias de ajuste son relativamente estrechas, o en los que la posición objetivo no puede enseñarse con precisión, sin atascar las piezas de trabajo. Con la opción Servofloat, las fuerzas externas (resultantes de los chaflanes de entrada) mueven el manipulador, ya que el control de par tiene prioridad sobre el control de posición.
El movimiento sensible puede incluir ejes individuales configurables ("servoflotación de enlace") o combinaciones de ejes del robot ("servoflotación lineal"), de modo que el movimiento de la dirección de montaje puede definirse de forma circular o lineal como un vector cartesiano basado en el sistema de coordenadas del robot.
Montaje robótico sensible con sensores de fuerza/par - Motofit
Cuando las funciones comunes del software del robot, como la limitación de la fuerza o el Servofloat, llegan a sus límites (en términos de sensibilidad del proceso, prevención de daños en las piezas o seguridad), a menudo se necesita la detección de la fuerza para las operaciones de inserción o apriete. Un sensor de fuerza proporciona información al sistema de control del robot y puede medir las fuerzas y los pares que se aplican en el efector final. La herramienta de montaje de control de fuerza YASKAWA MotoFit altera la posición del robot en función de la fuerza encontrada para alinear o ensamblar las piezas.
Si prefiere su propia marca de sensores de fuerza/par, los controladores YRC1000/FS100 ofrecen excelentes interfaces de comunicación de sensores estándar, por ejemplo, entradas digitales y analógicas rápidas, Ethernet integrada y otras interfaces de bus de campo. En caso de que las opciones estándar no estén disponibles, se pueden desarrollar e implementar todo tipo de controladores de sensores utilizando el entorno Motoplus C++ SDK.
Las operaciones de ensamblaje sensibles con retroalimentación de fuerza pueden ser entrenadas por redes neuronales.
Robots de agarre y cambiadores de herramientas
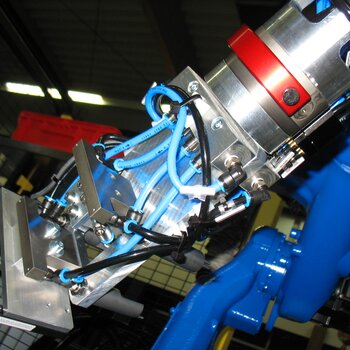
Nuestra red de pinzas
En el ensamblaje, al igual que en las aplicaciones de manipulación y pick & place, el diseño de las pinzas es crucial para el éxito de la aplicación. El diseño de las pinzas es un campo muy amplio que requiere una gran experiencia. También en este caso, YASKAWA coopera y apoya una amplia red de proveedores de pinzas y accesorios. Nos beneficiamos de sus conocimientos técnicos y diseñamos nuestras interfaces de hardware y software de forma que se garantice una funcionalidad perfecta con nuestros robots.
Junto con nuestros socios de la red de tecnología de agarre, por ejemplo en nuestra iniciativa Smart Series, ofrecemos soluciones Plug and Play perfectamente adaptadas a nuestros modelos de robots.
Soluciones de agarre flexibles para robots
Los trabajos de ensamblaje robótico suelen ser muy versátiles, ya que requieren el agarre de muchas piezas o conjuntos diferentes en distintas etapas de ensamblaje. Las pinzas pueden diseñarse para cubrir esta flexibilidad, ya sea añadiendo complejidad (pinzas de varios dedos) o reduciendo la complejidad (pinzas de dos dedos), girando la muñeca del robot o utilizando pinzas de varias posiciones. Para las pinzas adaptables con movimiento integrado, considere la posibilidad de manejar el movimiento directamente por el controlador del robot como servoejes externos.
Cambiadores automáticos de herramientas de agarre
Cuando la competitividad del diseño de las pinzas alcanza sus límites, los cambiadores de herramientas siempre funcionan. Los controladores de robot de Yaskawa admiten procedimientos rápidos de acoplamiento automático con una rápida recuperación del intercambio de señales eléctricas/de bus de campo/neumáticas, y son capaces de gestionar una gran biblioteca de herramientas diferentes.
Pinzas y piezas de agarre impresas en 3D para robots Motoman
Por cierto, la tecnología de impresión 3D se utiliza para las pinzas robóticas y sus piezas de recambio (dedos de pinza). La tecnología de impresión 3D permite un diseño rápido, compacto y ligero de las pinzas al integrar todas las funciones, por ejemplo, la alimentación neumática, en la carcasa de la pinza. Los dedos de las pinzas se imprimen en minutos. La impresión 3D se utiliza para la creación de prototipos de pinzas, iterando hasta conseguir el diseño de dedos de pinza perfecto para una aplicación.